Bagi warga yang tinggal di pedesaan, keterbatasan ketersediaan air merupakan masalah yang sangat umum. Oleh karena itu, banyak orang memasang tangki air di atap gedung. Air, yang disimpan dalam tangki air di basement (tanah) dipompa ke tangki air di atap menggunakan motor pompa. Dengan cara ini, masalah ketersediaan air yang terbatas dapat diperbaiki dan air dapat digunakan dengan cara yang lebih efisien jika pengontrol pompa tangki air otomatis disertakan dalam pengaturan.
Menggunakan tradisional untuk pengontrol ketinggian air memiliki keunggulan struktur sederhana dan biaya rendah. Pengontrol ketinggian air tradisional dapat mengontrol air di antara dua tingkat dengan bantuan bola mengambang/saklar pelampung sebagai sensor untuk pendeteksian ketinggian. Sesuai dengan posisi bola apung/saklar pengapung, sambungan listrik motor pompa diatur ke on atau off. Namun, unit pengontrol biasanya ditempatkan di bagian atas tangki air, kelembaban dapat menimbulkan korosi pada titik kontak sakelar sensor. Ini akan menyebabkan sakelar sensor menjadi tidak berfungsi. Sementara itu, karena tidak ada alat untuk mendeteksi ketinggian air tangki air basement, ada kemungkinan motor pompa akan terbakar jika ketinggian air di tangki air basement sangat rendah/nol.
Perangkat Keras Saklar Pompa Tangki Air Otomatis Automatic
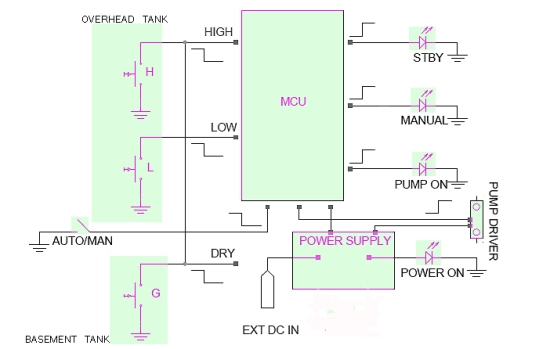
•Unit Mikrokontroler: Rangkaian yang dirancang yang ditampilkan di sini mencakup Atmega328P-PU sebagai kernel, sejumlah LED untuk menampilkan status sistem, sakelar tombol tekan untuk pemilihan mode otomatis/manual, relai elektromagnetik sebagai penggerak motor pompa, dan beberapa komponen eksternal lainnya.
Ide desain dasarnya adalah mengatur dua port MCU untuk deteksi ketinggian air, satu port untuk pemilihan sakelar mode otomatis/manual, dan dua port untuk indikasi status visual. Dari pembacaan port pendeteksi ketinggian air, perangkat lunak internal dapat menentukan ketinggian air tangki air di atas kepala. Perhatikan bahwa opsi penyimpanan E 2 PROM dari mikrokontroler juga digunakan di sini.
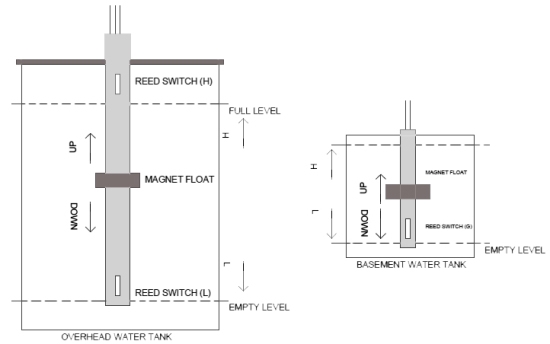
•Sensor Ketinggian Air: ketinggian tangki air atap (overhead) tidak lain adalah sakelar apung (siap pakai/buatan sendiri) yang digerakkan vertikal-mount (tingkat 2 titik) terdiri dari sensor ketinggian air rendah dan tinggi, ditempatkan di dua ketinggian yang berbeda di tangki air di atas kepala. Sensor level tangki air bawah tanah adalah sakelar apung sederhana (level 1 titik) lainnya, yang ditambahkan sebagai pelindung dry-run. Sakelar buluh tertutup rapat dalam kaca yang terletak di dalam batang diaktifkan/dinonaktifkan oleh gerakan magnet kuat ke atas/bawah di bagian ekor pelampung.
•Unit Catu Daya: Sirkuit akan bekerja dengan tegangan suplai DC dalam rentang 9 – 12V, dan karenanya setiap adaptor daya dc standar 1 Amper dengan tegangan output dalam rentang tersebut dapat digunakan untuk memberi energi ke seluruh sistem. Regulator tegangan linier on-board disertakan dalam sistem untuk menyediakan suplai dc bersih ke seluruh sirkuit elektronik.
Deskripsi sistem
Sebagaimana dinyatakan, untuk membaca ketinggian air tangki air di atas ada dua sensor, satu untuk level rendah (L) dan yang lainnya untuk level tinggi (H). Coba gunakan sakelar pelampung magnet yang mengaktifkan dua sensor buluh sehingga pelampung (dengan magnet) harus menghentikan perjalanannya di depan sensor buluh L dan H. Jika sensor L memicu input mikrokontroler, pompa air diaktifkan. Sekarang LED indikator STANDBY mati, dan LED indikator PUMP ON menyala. Ketika level H tercapai, yaitu sensor H memicu input mikrokontrolernya, pompa air dinonaktifkan. Sekarang indikator PUMP ON mati, dan indikator STANDBY menyala lagi. Pompa air diaktifkan kembali hanya ketika air turun kembali ke level L.
Selanjutnya, dalam mode otomatis, jika sensor ketiga (opsional) (sensor dry run) dipasang di tangki air basement, sensor (G) memicu input mikrokontrolernya untuk menginformasikan sistem bahwa tidak ada air di tangki air basement.
Akibatnya, sistem segera menonaktifkan pompa air untuk melindungi motor listrik pompa air.
Sistem ini juga dilengkapi dengan operasi Otomatis/Manual. Dalam mode AUTO, pompa air berhenti kemudian level air maksimum (H) tercapai. Dalam mode MANUAL, proses deteksi ketinggian air diganti dan pompa air terus bekerja tanpa henti. Secara bersamaan, LED indikator mode MANUAL menyala sebagai indikator peringatan.
Mode AUTO/MAN dapat dialihkan pada ketinggian air mana pun menggunakan sakelar tombol tekan AUTO/MAN.
Deskripsi Sirkuit atau Kontruksi
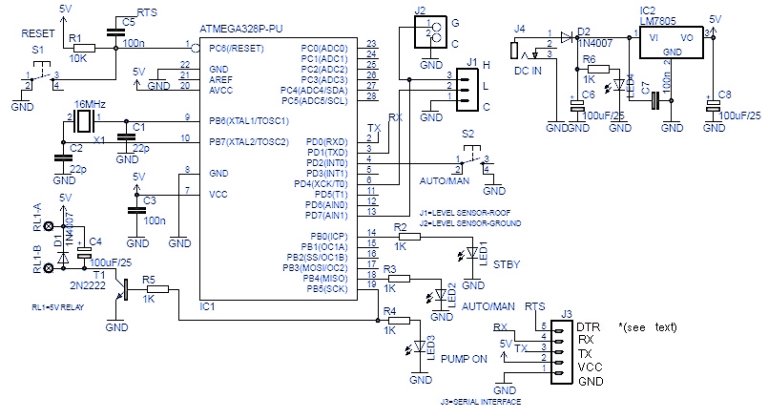
Chip Atmega328P-PU (IC1) di sirkuit ini sebenarnya adalah chip Arduino UNO, artinya IC1 menyimpan kode kecil yang disiapkan & diproses menggunakan Arduino IDE. Sakelar S1 adalah sakelar reset tradisional seperti yang ditemukan di papan Arduino. Di sini, port PD2, PD4 dan PD7 dari IC1 (D2, D4, D7 dari Arduino) dikonfigurasikan sebagai port input, dan port PB0, PB4 dan PB5 (D8, D12, D13 dari Arduino) dikonfigurasikan sebagai port output. Port PD2 terhubung ke sakelar pemilih mode AUTO/MAN. Sensor ketinggian air dibaca oleh port PD4 dan PD5. Port PB5 digunakan untuk mengontrol motor pompa air melalui relai elektromagnetik tugas berat (RL1) dengan bantuan transistor driver (T1). Port output lainnya (PB0 & PB5) digunakan untuk menggerakkan indikator status sistem (LED1 & LED2).
IC1 (tentu saja dengan Arduino UNO Bootloader yang telah dimuat sebelumnya) dapat diprogram/diprogram ulang melalui soket antarmuka serial J3 menggunakan papan FTDI Basic (papan konverter serial usb) yang tersedia secara umum. Sensor ketinggian air tangki air di atap, dan sensor ketinggian air tangki air di basement (tanah) dapat dihubungkan ke sirkuit melalui soket J1 dan J2 masing-masing.
Soket J4 adalah soket input DC, dari mana sistem ditenagai oleh suplai 5VDC yang diatur, yang telah diproses sebelumnya oleh chip pengatur tegangan terpasang (IC2). LED4 berfungsi sebagai indikator status catu daya (hidup/mati).

Deskripsi Perangkat Lunak
Dari diagram sirkuit (perangkat keras), seseorang dapat menemukan bahwa sangat sedikit komponen eksternal yang diperlukan. Selain itu, orang juga dapat menemukan bahwa perangkat lunak ini sangat mudah untuk dimodifikasi jika lebih banyak fungsi yang akan ditambahkan. Ini akan meningkatkan fleksibilitas dan tanggung jawab desain. Berikut adalah inti logika mikrokontroler, disiapkan di Arduino IDE:
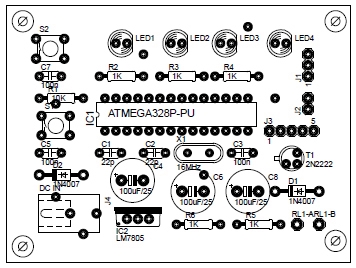
Tata letak komponen yang disarankan untuk PCB dua sisi
Mikrokontroler pada board Arduino memiliki memori EEPROM (E 2 PROM) yang nilainya disimpan saat board dimatikan. Pustaka EEPROM memungkinkan Anda membaca dan menulis byte tersebut. Mikrokontroler Atmega328 memiliki jumlah 1024 byte.
Terima Kasih banyak atas kunjungan Anda
Dipublikasikan oleh Electric Dermayon©
- Proyek 8×8 dot Matrik Arduino versi 1Cara memprogram 8×8 Dot Metrik dengan ARDUINO Pertama-tama kami ingin menjelaskan tentang Proyek ini, sebenarnya Proyek ini kami tunjukan dengan sederhana atau langkah pertama untuk proyek 8×8 Dot Matrix ini. Adapun Proyek 8×8 Dot Matrix yang lebih rumit nanti kita akan jelaskan Proyek versi lanjut pada postingan selanjutnya atau Versi 2, Versi 3 dan Versi-versiLanjutkan membaca “Proyek 8×8 dot Matrik Arduino versi 1”
- Cara memprogram Chip ATtiny85 menggunakan Arduino versi 2Memprogram ATtiny85 (Menggunakan Arduino Uno)Mengecilkan proyek Arduino Anda menghemat uang dan ruang! Berikut kami akan menunjukan langkah-langkah atau cara memprogram chip ATtiny85(Chip Mikrokontroler). KOMPONEN Sebelum kita mulai dengan pembuatan sirkuit, buka Arduino IDE. Perangkat Lunak ArduinoBuka Sketch ArduinoISP dari menu File, Example dan ArduinoISP: Verifikasi dan unggah sketsa ini ke Arduino AndaPerangkat lunak Arduino tidakLanjutkan membaca “Cara memprogram Chip ATtiny85 menggunakan Arduino versi 2”
- Cara memprogram ATtiny85 dengan Arduino versi 1Langkah-langkah tentang cara memprogram mikrokontroler ATtiny85 dengan papan pengembangan Arduino Uno. KOMPONEN : Platform Arduino ATtiny85 Kapasitor Pemisah Elektrolit – 10 uF/25v Kabel Jumper M-M TENTANG PROYEK INI Kami sedang mengerjakan proyek yang mengharuskan membaca beberapa data sensor di lokasi yang berbeda. Ini hanya membutuhkan beberapa pin PWM sehingga menggunakan beberapa Arduino Uno akan mahalLanjutkan membaca “Cara memprogram ATtiny85 dengan Arduino versi 1”
- Cara mengganti Air otomatis dengan ArduinoProyek mengganti Air Otomatis Dipublikasi : Indramayu, Indonesia Pada Proyek ini mungkin kami akan menjelaskan lebih mendetail tentang Cara Mengganti Air secara Otomatis menggunakan Platform Arduino Uno. Maksud dari “Cara Mengganti Air secara Otomatis” menggunakan Platform Arduino adalah ketika kita mempunyai sebuah Bak Aquarium atau Tampungan Air dan Air dalam tampungan tersebut Keruh, tentu sajaLanjutkan membaca “Cara mengganti Air otomatis dengan Arduino”
- Membuat Sistem Pergantian Air dengan ArduinoBagi warga yang tinggal di pedesaan, keterbatasan ketersediaan air merupakan masalah yang sangat umum. Oleh karena itu, banyak orang memasang tangki air di atap gedung. Air, yang disimpan dalam tangki air di basement (tanah) dipompa ke tangki air di atap menggunakan motor pompa. Dengan cara ini, masalah ketersediaan air yang terbatas dapat diperbaiki dan airLanjutkan membaca “Membuat Sistem Pergantian Air dengan Arduino”
- Proyek Remot ArduinoProyek Remott dengan Inframerah(IR) Dikirim oleh Electric Dermayon Komunikasi inframerah (IR) adalah teknologi nirkabel yang banyak digunakan dan mudah diimplementasikan yang memiliki banyak aplikasi yang berguna. Contoh paling menonjol dalam kehidupan sehari-hari adalah remote control TV/video, sensor gerak, dan termometer inframerah. Ada banyak proyek Arduino menarik yang menggunakan komunikasi IR juga. Dengan pemancar dan penerima IRLanjutkan membaca “Proyek Remot Arduino”
- Memprogram Arduino dengan Hp AndroidBagaimana memprogram Platform Arduino dengan Handphone Android ? Memprogram Platform Arduino dengan Handphone Android Akhir-akhir ini telah banyak dari berbagai kalangan usia suka belajar seputar Technologi modern, seperti belajar Technologi Dasar menggunakan Platform Mikrokontroler Arduino. Tapi tidak sedikit dari mereka yang belajar dengan Platform mikrokontroler Arduino harus kecewa, karena mereka tidak mempunyai Laptop atau KomputerLanjutkan membaca “Memprogram Arduino dengan Hp Android”
